存储管理
存储器的结构:寄存器 —— 高速缓存 Cache —— 主存 —— 外存
地址重定位:将逻辑地址转换为实际主存物理地址的过程,分为静态重定位(在程序存入主存时就完成了转换)、动态重定位(边运行边转换)。
分区存储管理
所谓的分区存储组织,就是整存,将某进程运行所需的内存整体一起分配给它,然后再运行,有三种分区方式:
固定分区
静态分区方法,将主存分为若干个固定的分区,将要运行的作业装配进去,由于分区固定,大小和作业需要的大小不同,会产生内部碎片。
可变分区
动态分区方法,主存空间的分区是作业转入时划分,正好划分为作业需要的大小,这样就不存在内部碎片,但容易将整片主存空间切割成许多块,会产生外部碎片,可变分区的算法如下:
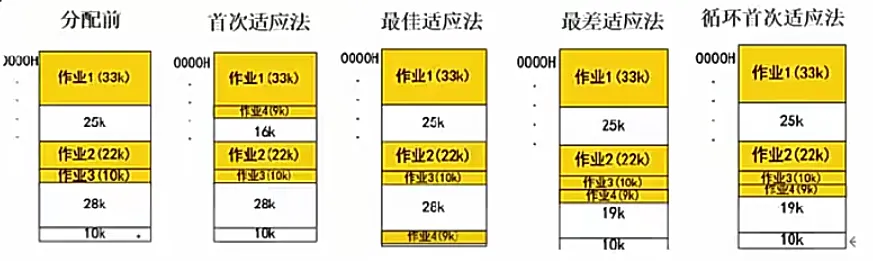
系统分配内存的算法有很多,如下图所示,根据分配前的内存情况,还需要分配 9 K 空间,对不同算法的结果介绍如下:
- 首次适应法:按内存地址顺粗从头查找,找到第一个
>=9K空间的空闲块,即切割 9K 空间分配给进程。 - 最佳适应法:按内存中所有空闲内存块按从小到大排序,找到第一个
>= 9K空间的空闲块,切割分配,这个将会找到与9k空间最相近的空闲块。 - 最差适应法:和最佳适应法相反,将内存中空闲块空间最大的,切割 9K 空间分配给进程,这是为了 预防系统中产生过多的细小空闲块。
- 循环首次适应法:按内存地址顺序查找,找到第一个
>=9K 空间的空闲块,而后若还需分配,则找下一个,不用每次都从头查找,这是与首次适应法不同的地方。
可重定位分区
可以解决碎片问题,移动所有已经分配好的区域,使其成为一个连续的区域,这样其它外部细小的分区碎片可以合并为大的分区,满足作业要求。只在外部请求空间得不到满足时进行。
页式存储管�理
如果采用分区管理,都是整存,会出现一个问题,即当 进程运行所需内存大于系统内存时,就无法将整个进程一起调入内存,因此无法运行,若要解决此问题,就要采用段页式存储组织,页式存储是基于可变分区而提出的。
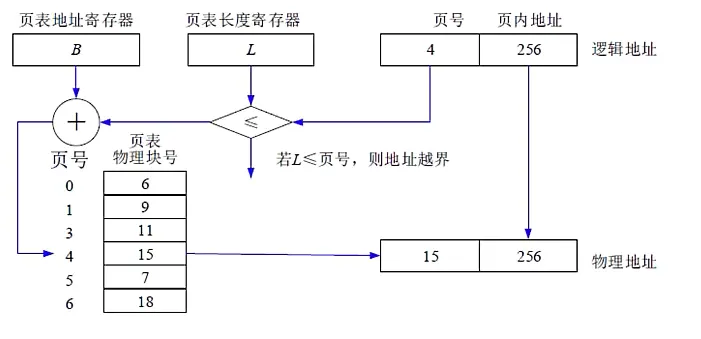
页式存储组织,将进程空间分成一个个页,假设每个页的大小为 4K,同样的将系统的物理空间也分成一个个 4K 大小的物理块,这样,每次将需要运行的逻辑页装入物理块中,运行完再装入其它需要运行的页,这样就可以分批次运行完进程,而无需将整块逻辑空间全部装入物理内存中,解决了空间极大的进程的运行问题。
逻辑页分为页号和页内地址,页内地址就是物理偏移地址,而页号与物理块号并非按序对应的,需要查询页表,才能得知页号对应的物理块号,再用物理块号加上偏移地址才能得出真正运行时的物理地址。
优点:利用率高、碎片小,分配及管理简单。
缺点: 增加了系统开销,可能产生抖动现象。
页地址分为页号和页内地址,页号代表当前时第多少页;页内地址只跟页的大小有关,比如 4KB 的页,页内地址就有 个字节。
页内地址是不变的,页号是可变的,页表存放的就是逻辑页号和物理块号之间的对应关系。相互转换时,页内偏移量不变。
页面置换算法
有时候,进程空间分为 100 个页面,而系统内存只有 10 个内存块,无法全部满足分配,就需要将马上要执行的页面先分配出去,而后根据算法进行淘汰,使 100 个页面能够按执行顺序调入物理块中执行完。
缺页表示需要执行的页不在内存物理块中,需要从外部调入内存,会增加执行时间,因此,缺页数越多,系统效率越低。页面置换算法如下:
- 最优算法:OPT,理论上的算法,无法实现,是在进程执行完后进行的最佳效率计算,用来让其它算法比较差距。原理是选择未来最长时间不被访问的页面置换,这样可以保证未来执行的都是马上要访问的。
- 先进先出算法:FIFO,先调入内存的页先被置换淘汰,会产生 抖动现象,即分配的页数越多,缺页率可能越多(即效率越高)。
- 最近最少使用:LRU,在最近的过去,进程执行过程中,过去最少使用的页面被置换淘汰,根据局部性原理,这种方式效率高,且不会产生抖动现象,使用大量计数器,但是没有 LFU 多。
- 淘汰原则:优先淘汰最近未访问的,而后淘汰最近未被修改的页面。
快表
快表是一块小容量的级相联存储器,由快速存储器组成,按内容访问,速度快,并且可以从硬件上保证按内容并行查找,一般用来存放当前访问最频繁的少数活动页面的页号。
快表是将页表存于 Cache 中;慢表将页表存于内存上。慢表需要访问两次内存才能取出页,而快表是访问一次 Cache 和一次内存,速度更快。
段式存储管理
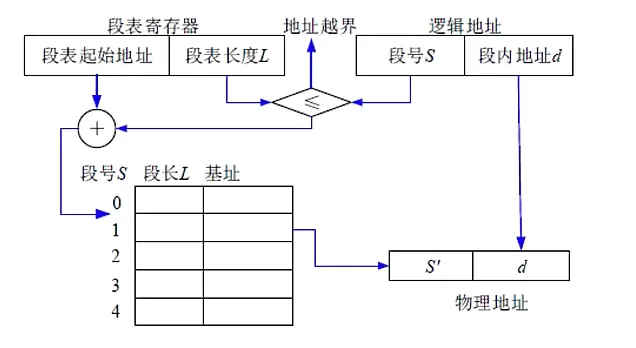
将进程空间分为一个个段,每段也有段号和段内地址,与页式存储管理不同的是,每段物理大小不同,分段是根据逻辑整体分段的,因此,段表也与页表的内容不�同,页表中直接是逻辑页号对应物理块号,而段表有段长和基址两个属性,才能确定一个逻辑段在物理段中的位置。
优点:多道程序共享内存,各段程序修改互不影响。
缺点: 内存利用率低,内存碎片浪费大。
分页是根据物理空间划分,每页大小相同;分段是根据逻辑空间划分,每段是一个完整的功能,便于共享,但是大小不同。
地址表示
(段号,段内偏移):其中段内偏移不能超过该段号对应的段长,否则越界错误,而此地址对应的真正内存地址应该是:段号对应的基地址+段内偏移